驅動(dòng)電路的性能很大程度上影響整個(gè)系統的工作性能。驅動(dòng)電路的設計中主要考慮功能和性能等方面的因素,例如電機是單向還是雙向轉動(dòng)、需不需要調速等等。對于單向的電機驅動(dòng),只要用一個(gè)大功率三極管或場(chǎng)效應管或繼電器直接帶動(dòng)電機即可,當電機需要雙向轉動(dòng)時(shí),可以使用由4個(gè)功率元件組成的H橋電路或者使用一個(gè)雙刀雙擲的繼電器。如果不需要調速,只要使用繼電器即可:但如果需要調速,可以使用三極管,場(chǎng)效應管等開(kāi)關(guān)元件實(shí)現PWM(脈沖寬度調制)調速。
我某平臺的驅動(dòng)電路為雙極性驅動(dòng)方式,利用H橋驅動(dòng)電路和PWM控制實(shí)現對直流電動(dòng)機正反兩個(gè)方向的調速控制和伺服控制。由于H橋驅動(dòng)電路和PWM調速的電機驅動(dòng)電路存在共態(tài)導通、反向制動(dòng)電流過(guò)大等一些問(wèn)題,在實(shí)際工作和實(shí)驗中,會(huì )遇到驅動(dòng)電路失效問(wèn)題。下面,就幾種經(jīng)常出現的失效現象對驅動(dòng)電路作以失效性分析。
1 某平臺的電機驅動(dòng)電路
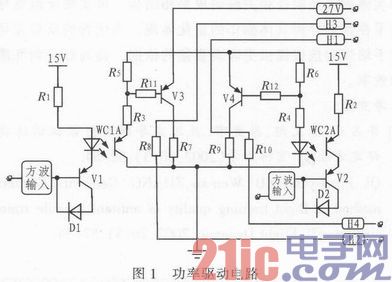
1.1 功率驅動(dòng)電路部分
控制信號經(jīng)過(guò)比較器產(chǎn)生方波,經(jīng)過(guò)如圖1所示電路輸出(H1~H4)到功率模塊。通過(guò)計算機控制繼電器的吸合,為功率模塊供電,功率模塊輸出控制信號到機構。
1.2 功率模塊部分
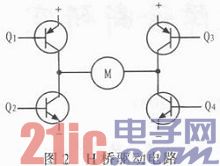
該設備功率模塊采用東芝某型號功率模塊,模塊內部電路構成是典型的“H橋驅動(dòng)電路”。電路得名于“H橋驅動(dòng)電路”是因為它的形狀酷似字母H。4個(gè)三極管組成H的4條垂直腿,而電機就是H中的橫杠。
如圖2所示,H橋式電機驅動(dòng)電路包括4個(gè)三極管和一個(gè)電機。要使電機運轉,必須導通對角線(xiàn)上的一對三極管。根據不同三極管對的導通情況,電流可能會(huì )從左至右或從右至左流過(guò)電機,從而控制電機的轉向。
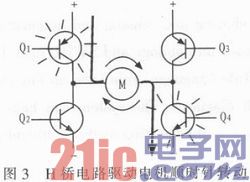
要使電機運轉,必須使對角線(xiàn)上的一對三極管導通。例如,如圖3所示,當Q1管和Q4管導通時(shí),電流就從電源正極經(jīng)Q1從左至右穿過(guò)電機,然后再經(jīng)Q4回到電源負極。按圖中電流箭頭所示,該流向的電流將驅動(dòng)電機順時(shí)針轉動(dòng)。當三極管Q1和Q4導通時(shí),電流將從左至右流過(guò)電機,從而驅動(dòng)電機按特定方向轉動(dòng)(電機周?chē)募^指示為順時(shí)針?lè )较?。當三極管Q2和Q3導通時(shí),電流將從右至左流過(guò)電機,從而驅動(dòng)電機沿另一方向轉動(dòng)。
2 常見(jiàn)失效信息及失效分析
2.1 失效信息1及分析
信息1:樣品所在儀器在出問(wèn)題的前一天正常關(guān)機,第二天儀器加電,就出現電機自動(dòng)轉動(dòng),而正常時(shí)電機在沒(méi)有輸入信號的情況下應該停在當前位置。
分析:驅動(dòng)電機時(shí),保證H橋上2個(gè)同側的三極管不會(huì )同時(shí)導通非常重要。如圖2所示,如果三極管Q1和Q2同時(shí)導通,那么電流就會(huì )從正極穿過(guò)2個(gè)三極管直接回到負極。此時(shí),電路中除了三極管外沒(méi)有其他任何負載,因此電路上的電流就可能達到最大值(該電流僅受電源性能限制),甚至燒壞三極管。
在儀器正常關(guān)機的時(shí)候,電機產(chǎn)生反電動(dòng)勢,導致2個(gè)功率模塊均有一個(gè)三極管芯片發(fā)生表面擊穿,如圖2中的Q1、Q4或者Q2、Q3三極管,同時(shí)由于擊穿短路的瞬間大電流,造成固體繼電器過(guò)電流燒毀短路。當儀器再開(kāi)機器的時(shí)候,由于被擊穿的2個(gè)三級管和固體繼電器已經(jīng)短路,形成回路給電機供電,導致儀器在開(kāi)機后自動(dòng)轉動(dòng)。
2.2 失效信息2及分析
信息2:樣品在正常工作過(guò)程中,發(fā)出控制信號后,發(fā)現電機仍舊保持原有的轉動(dòng)方向,檢查電機控制電路發(fā)現在控制電路中的功率模塊發(fā)熱異常。
分析:儀器正常工作,在工作過(guò)程中電機產(chǎn)生反電動(dòng)勢,導致2個(gè)功率模塊均有一個(gè)三極管芯片發(fā)生表面擊穿,如圖2中的Q1、Q4或者Q2、Q3三極管,當發(fā)出電機改變方向控制命令時(shí),三極管依然處于導通狀態(tài),電機無(wú)法停止轉動(dòng),但由于另一控制電機反方向的兩功率管接受了改變方向的信號后也處于在導通狀態(tài),這時(shí)候兩功率模塊的四個(gè)功率芯片都處在導通態(tài),導致電源端與地短路,產(chǎn)生成倍的短路大電流,功率模塊發(fā)熱異常,最終燒毀,過(guò)大的電流導致繼電器燒毀。
2.3 失效信息3及分析
信息3:儀器在加電工作一段時(shí)間后,發(fā)出控制信號后,發(fā)現電機不轉動(dòng)。
分析:儀器正常工作電機的反電動(dòng)勢導致至少一個(gè)三極管表面擊穿,在發(fā)出其他控制信號時(shí)候,電源與地短路,導致電機無(wú)動(dòng)作,功率模塊與繼電器燒毀,同時(shí)圖1中的V3或V4也被擊穿,過(guò)大的電流還會(huì )導致該通路上的電阻過(guò)熱發(fā)黑。
3 問(wèn)題總結及解決方案
導致樣品失效原因是由于電機產(chǎn)生的反電動(dòng)勢使功率模塊內部的三極管芯片產(chǎn)生表面擊穿,致使電源與地短路,產(chǎn)生大電流導致功率模塊與繼電器以及三極管燒毀。可能有以下原因:
1)功率模塊是非密封結構,雖然內部有硅橡膠和硅凝膠保護,但不能完全阻斷長(cháng)期的潮濕環(huán)境存放水汽進(jìn)入芯片表面,這個(gè)是造成表面擊穿的可能原因。
2)對圖2電路的分析可知,根據電機運行脈沖分配的要求,Q1,Q2,Q3,Q4經(jīng)常處于交替工作狀態(tài),由于晶體管的關(guān)斷過(guò)程中有一段存儲時(shí)間和電流下降時(shí)間,總稱(chēng)關(guān)斷時(shí)間,在這段時(shí)間內,晶體管并沒(méi)完全關(guān)斷。若在此期間,另一個(gè)晶體管導通,則造成上、下兩管直通而使電源短路,燒壞晶體管或其他元器件。
解決方案如下:
1)由于設備工作環(huán)境比較潮濕,在長(cháng)時(shí)間沒(méi)有訓練或任務(wù)情況時(shí),除了保持艙內干燥意外,還應定期打開(kāi)機箱的風(fēng)扇對設備進(jìn)行除濕;
2)為了避免直通現象,可調節邏輯延時(shí)電路增加時(shí)延,以使H橋電路上、下兩管交替導通時(shí)可產(chǎn)生一個(gè)“死區時(shí)間”,先關(guān)后開(kāi),防止上、下兩管直通現象。
3)布線(xiàn)時(shí)大電流線(xiàn)路要盡量的短粗,并且盡量避免經(jīng)過(guò)過(guò)孔,一定要經(jīng)過(guò)過(guò)孔的話(huà)要把過(guò)孔做大一些(>1 mm)并且在焊盤(pán)上做一圈小的過(guò)孔,在焊接時(shí)用焊錫填滿(mǎn),否則可能會(huì )燒斷。另外,如果使用了穩壓管,場(chǎng)效應管源極對電源和地的導線(xiàn)要盡可能的短粗,否則在大電流時(shí),這段導線(xiàn)上的壓降可能會(huì )經(jīng)過(guò)正偏的穩壓管和導通的三極管將其燒毀。
4)為了提高電力的可靠性,必須設置緩沖電路軟化開(kāi)關(guān)過(guò)程。合理的緩沖電路不但降低了功率器件的浪涌電壓du/dt和浪涌電流di/ dt,而且還降低了器件的開(kāi)關(guān)損耗和電磁干擾,避免了器件的二次擊穿。
4 結論
通過(guò)對電機驅動(dòng)電路的失效性分析,讓我們更加深刻地認識到驅動(dòng)電路的可靠性的重要性。電機驅動(dòng)電路的設計應該盡可能做到,無(wú)論加上何種控制信號,何種無(wú)源負載,電路都是安全的。
以上內容由西安西瑪電機網(wǎng)絡(luò )部收集整理發(fā)布,僅為傳播更多電機相資訊、電機知識供讀者參考之用,不代表西瑪集團同意或默認以上內容的正確性和有效性。讀者根據本文內容所進(jìn)行的任何商業(yè)行為,西瑪集團不承擔任何連帶責任。如果以上內容不實(shí)或侵犯了您的知識產(chǎn)權,請及時(shí)與我們聯(lián)系,西瑪電機網(wǎng)絡(luò )部將及時(shí)予以修正或刪除相關(guān)信息。
西安西瑪電機集團網(wǎng)站: www.viptest.net |
